Spend less time building and maintaining so you can spend more time developing and flying.
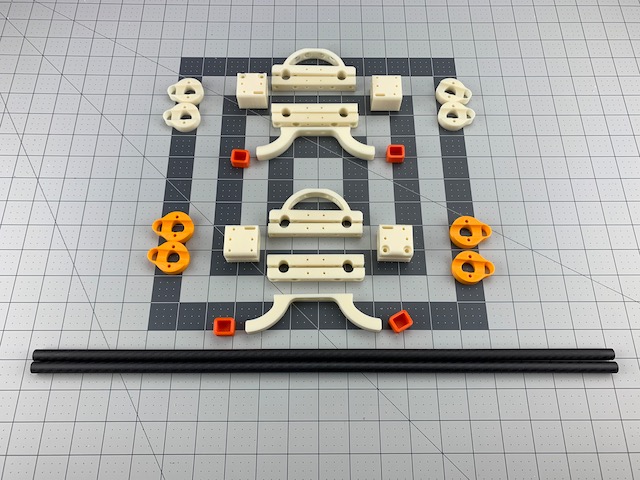
The devFrame is a 3D printable, Open Source quadcopter and rover frame design. Supports 300-500 class quadcopter frames in Stretch X, Hybrid X and H configurations, as well as skid steer rovers (rover coming soon).
To complete your build we provide step by step instructions to take you from a pile of parts on the bench to a flying, or roving, robot.
Spares To Spare
Avoid vendor lock and lack of spare parts with Open Source 3D printed parts, off the shelf tubes, and hardware store fasteners.
Room To Spare
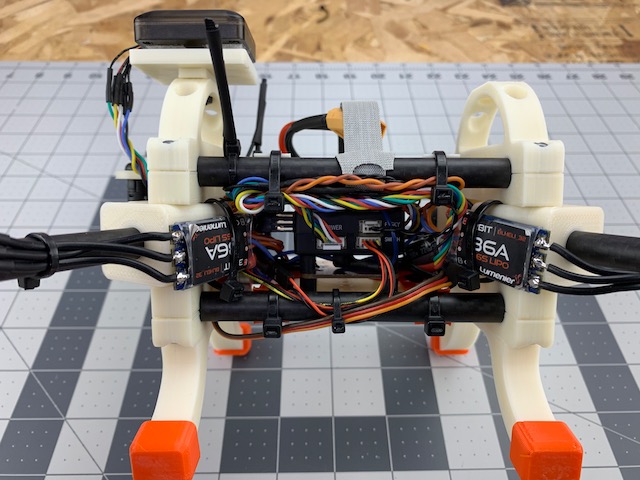
Enjoy a large internal volume with room left over for battery, companion computer, and sensors.
Options To Spare
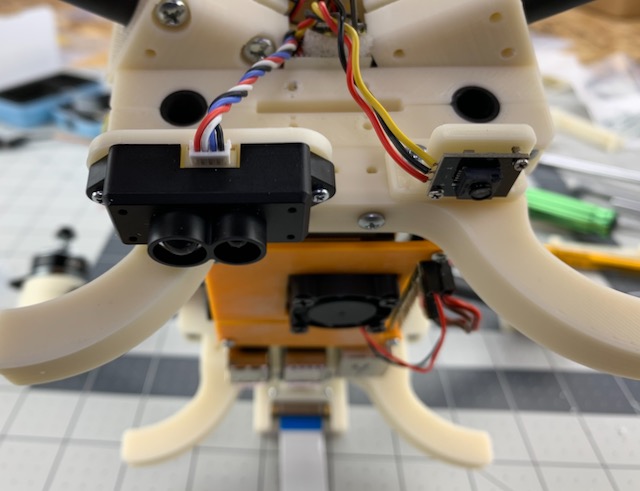
Build various frame sizes and geometries with support for several different popular sensors and companion computers.
Features
- Open Source Hardware (CERN v2.0)
- 3D printable components
- Off the shelf carbon fiber tubes
- Hardware store fasteners such as screws and zip ties
- Standardized mechanical interfaces
- Several ready to go mounts and adapters
- Minimize tool requirements
- No specialist tools to build frame
- No vendor lock
- Step by step instructions
- Full parameter files for common builds
Specifications
- Size can scale from 300-500mm
- X, Stretch X, Hybrid X, H Frame Geometry
- Supports prop sizes from 5in to 10in
- Supports up to 2kg flying weight
- 10mm tube on 60mm spacing for off the shelf accessory mounts
- 15mm and 30mm mounting hole spacing
Currently Supported Companion Computers and Sensors
- RPi 0/3/4 Mounts and Covers
- RPi Camera Module Mounts and Covers
- NVIDIA Jetson Nano Mount
- Benewake TFMini Mount
- CUAV PXFlow Mount
- mRo GPS Mount and Cover
- Seeed Studio ThoneFlow Mount
- Flight Controllers with 30.5mm x 30.5mm